mirror of
https://github.com/TomHodson/tomhodson.github.com.git
synced 2025-06-26 10:01:18 +02:00
Squashed commit of the following:
commit 95c9eb09fb95bb65e6d8836f908ff551fd66b4a8
Author: Tom <thomas.hodson@ecmwf.int>
Date: Fri Apr 4 22:48:31 2025 +0100
New post
This commit is contained in:
parent
f4c5314f7c
commit
4b473c4bf3
44
_posts/2025-04-04-rara-elegoo-printer-notes.md
Normal file
44
_posts/2025-04-04-rara-elegoo-printer-notes.md
Normal file
@ -0,0 +1,44 @@
|
||||
---
|
||||
title: RARA Elegoo Printer Notes
|
||||
layout: post
|
||||
excerpt: Notes for the 3D printer at my co-working space.
|
||||
exclude_from_rss: true
|
||||
|
||||
assets: /assets/blog/rara-elegoo-printer-notes
|
||||
thumbnail: /assets/blog/rara-elegoo-printer-notes/thumbnail.jpg
|
||||
social_image: /assets/blog/rara-elegoo-printer-notes/thumbnail.jpg
|
||||
alt: A photo of the main circuit board in this 3D printer.
|
||||
---
|
||||
|
||||
---
|
||||
|
||||
| Printer | Elegoo Neptune 2 |
|
||||
| Control Board | ZNP Robin Nano V1.3 [Schematic of similar board](https://github.com/makerbase-mks/MKS-Robin-Nano-V1.X/blob/master/hardware/MKS%20Robin%20Nano%20V1.3_002/MKS%20Robin%20Nano%20V1.3_002%20SCH.pdf) |
|
||||
| Microcontroller | STM32F407VET6 |
|
||||
| Extruder / Hotend combo | [BIQU H2V2](https://biqu.equipment/products/biqu-h2-v2-0-extruder) |
|
||||
| Original Firmware | [ZNP-Robin-Nano-V1.2-V1.3](https://github.com/NARUTOfzr/ZNP-Robin-Nano-V1.2-V1.3/tree/master/ZNP_Robin_Nano_V1.2%20Firmware) |
|
||||
| Current Firmware | [Original Board Firmware](https://github.com/NARUTOfzr/ZNP-Robin-Nano-V1.2-V1.3/tree/master/ZNP_Robin_Nano_V1.2%20Firmware)
|
||||
| Z Probe | [BLTouch](https://www.antclabs.com/_files/ugd/f5a1c8_d40d077cf5c24918bd25b6524f649f11.pdf) |
|
||||
| Manual | [General Guide](https://github.com/oinosme/elegoo-neptune2-2s-guide) |
|
||||
| PDF Manual | [PDF]({{ page.assets }}/Neptune 2 & Neptune 2S User Guide (EN).pdf) |
|
||||
| Default config.cfg for Klipper | [Default config.cfg](https://github.com/Klipper3d/klipper/blob/master/config/printer-elegoo-neptune2-2021.cfg) |
|
||||
| Currentish config.cfg | [Current config.cfg](/assets/blog/rara-elegoo-printer-notes/klipper_config.cfg)|
|
||||
| Microcontroller Datasheet | [Datasheet]({{ page.assets }}/micro_datasheet.pdf) |
|
||||
|
||||
---
|
||||
|
||||
<figure>
|
||||
<img src="{{ page.assets }}/mainboard_connectors.png">
|
||||
</figure>
|
||||
|
||||
<figure>
|
||||
<img src="{{ page.assets }}/micro_pinout.png">
|
||||
</figure>
|
||||
|
||||
<figure>
|
||||
<img src="{{ page.assets }}/pcb.png">
|
||||
</figure>
|
||||
|
||||
<figure>
|
||||
<img src="{{ page.assets }}/hotend.png">
|
||||
</figure>
|
||||
BIN
assets/blog/rara-elegoo-printer-notes/hotend.png
Normal file
BIN
assets/blog/rara-elegoo-printer-notes/hotend.png
Normal file
Binary file not shown.
|
After 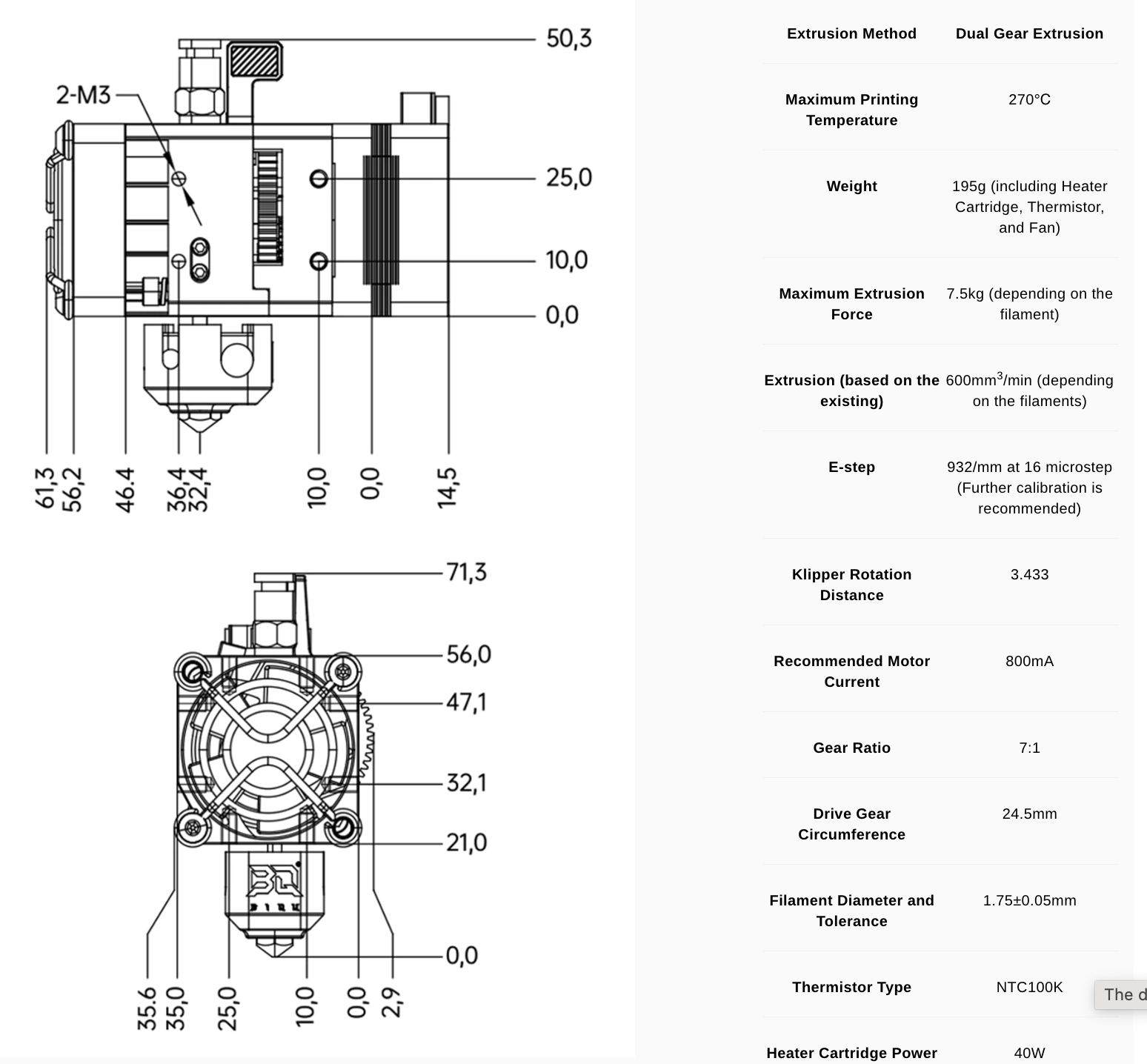
(image error) Size: 460 KiB |
163
assets/blog/rara-elegoo-printer-notes/klipper_config.cfg
Normal file
163
assets/blog/rara-elegoo-printer-notes/klipper_config.cfg
Normal file
@ -0,0 +1,163 @@
|
||||
# This file is originally from https://github.com/Klipper3d/klipper/blob/master/config/printer-elegoo-neptune2-2021.cfg
|
||||
|
||||
# Paste here and save your klipper configuration
|
||||
# This file contains standard pin mappings for the stock Elegoo Neptune 2 with a
|
||||
# ZNP Robin Nano (v 1.2 and v1.3) board.
|
||||
# For the 1.2 board:
|
||||
# - Compile with the processor model STM32F103.
|
||||
# - Enable "extra low-level configuration options"
|
||||
# - Select the 28KiB bootloader,
|
||||
# - Select (Serial (on # USART3 PB11/PB10) for the communication interface.
|
||||
# Note that the "make flash" command does not work with ZNP Robin boards. After
|
||||
# running "make", run the following command:
|
||||
# ./scripts/update_mks_robin.py out/klipper.bin out/elegoo.bin
|
||||
#
|
||||
# For the 1.3 board:
|
||||
# - Compile with the processor model STM32F407.
|
||||
# - Enable "extra low-level configuration options"
|
||||
# - Select the 32KiB bootloader,
|
||||
# - Select (Serial (on # USART3 PB11/PB10) for the communication interface.
|
||||
# Note that the "make flash" command does not work with ZNP Robin boards. After
|
||||
# running "make", run the following command:
|
||||
# cp out/klipper.bin out/elegoo.bin
|
||||
#
|
||||
# Copy the file out/elegoo.bin to an SD card and then restart the printer with
|
||||
# that SD card.
|
||||
# See docs/Config_Reference.md for a description of parameters.
|
||||
|
||||
[bltouch]
|
||||
sensor_pin: ^PC4
|
||||
control_pin: PA8
|
||||
z_offset: 3.1
|
||||
x_offset: -35
|
||||
y_offset: -1
|
||||
stow_on_each_sample: false
|
||||
probe_with_touch_mode: true
|
||||
|
||||
[stepper_x]
|
||||
step_pin: PE3
|
||||
dir_pin: PE2
|
||||
enable_pin: !PE4
|
||||
microsteps: 16
|
||||
rotation_distance: 40
|
||||
endstop_pin: PA15
|
||||
position_endstop: 0
|
||||
position_max: 235
|
||||
homing_speed: 50
|
||||
|
||||
[stepper_y]
|
||||
step_pin: PE0
|
||||
dir_pin: PB9
|
||||
enable_pin: !PE1
|
||||
microsteps: 16
|
||||
rotation_distance: 40
|
||||
endstop_pin: PA12
|
||||
position_endstop: 0
|
||||
position_max: 235
|
||||
homing_speed: 50
|
||||
|
||||
[stepper_z]
|
||||
step_pin: PB5
|
||||
dir_pin: !PB4
|
||||
enable_pin: !PB8
|
||||
microsteps: 16
|
||||
rotation_distance: 8
|
||||
endstop_pin: PA11
|
||||
position_endstop: 0.7
|
||||
position_max: 250
|
||||
|
||||
[extruder]
|
||||
max_extrude_only_distance: 100.0
|
||||
step_pin: PD6
|
||||
dir_pin: PD3
|
||||
enable_pin: !PB3
|
||||
microsteps: 16
|
||||
rotation_distance: 3.433 # https://biqu.equipment/products/biqu-h2-v2s-extruder-for-b1-bx-ender-3-3-v2-5-6-cr6-10
|
||||
nozzle_diameter: 0.400
|
||||
filament_diameter: 1.750
|
||||
heater_pin: PC3
|
||||
sensor_type: EPCOS 100K B57560G104F
|
||||
sensor_pin: PC1
|
||||
# tuned for stock hardware with 210 degree Celsius target
|
||||
control: pid
|
||||
pid_Kp: 29.056
|
||||
pid_Ki: 1.628
|
||||
pid_Kd: 129.664
|
||||
min_temp: 0
|
||||
max_temp: 260
|
||||
|
||||
[filament_switch_sensor filament_sensor]
|
||||
pause_on_runout: True
|
||||
switch_pin: PA4
|
||||
|
||||
[heater_bed]
|
||||
heater_pin: PA0
|
||||
sensor_type: EPCOS 100K B57560G104F
|
||||
sensor_pin: PC0
|
||||
# tuned for stock hardware with 60 degree Celsius target
|
||||
control: pid
|
||||
pid_Kp: 70.857
|
||||
pid_Ki: 1.221
|
||||
pid_Kd: 1028.316
|
||||
min_temp: 0
|
||||
max_temp: 110
|
||||
|
||||
# cools the control board and hotend cooler fans
|
||||
# enabled whenever any of the stepper controllers are active
|
||||
[heater_fan hotend_fan]
|
||||
pin: PB0
|
||||
heater: extruder
|
||||
heater_temp: 50.0
|
||||
|
||||
# controls the part cooling fan
|
||||
[fan]
|
||||
pin: PB1
|
||||
|
||||
[mcu]
|
||||
serial: /dev/ttyUSB0
|
||||
restart_method: command
|
||||
|
||||
[bed_screws]
|
||||
screw1: 32.5, 32.5
|
||||
screw2: 32.5, 202.5
|
||||
screw3: 202.5, 32.5
|
||||
screw4: 202.5, 202.5
|
||||
|
||||
[printer]
|
||||
kinematics: cartesian
|
||||
max_velocity: 300
|
||||
max_accel: 3000
|
||||
max_z_velocity: 5
|
||||
max_z_accel: 100
|
||||
|
||||
[bed_mesh]
|
||||
speed: 120
|
||||
horizontal_move_z: 7
|
||||
mesh_min: 40, 40
|
||||
mesh_max: 200, 200
|
||||
probe_count: 4, 4
|
||||
|
||||
[static_digital_output display_reset]
|
||||
# the FSMC touchscreen isn't supported, so we'll just disable it
|
||||
pins: !PC6, !PD13
|
||||
|
||||
#*# <---------------------- SAVE_CONFIG ---------------------->
|
||||
#*# DO NOT EDIT THIS BLOCK OR BELOW. The contents are auto-generated.
|
||||
#*#
|
||||
#*# [bed_mesh default]
|
||||
#*# version = 1
|
||||
#*# points =
|
||||
#*# 0.105000, 0.125000, 0.060000, 0.037500
|
||||
#*# 0.060000, 0.102500, 0.142500, -0.105000
|
||||
#*# 0.017500, 0.110000, 0.152500, -0.132500
|
||||
#*# 0.022500, 0.115000, 0.097500, -0.085000
|
||||
#*# tension = 0.2
|
||||
#*# min_x = 40.0
|
||||
#*# algo = lagrange
|
||||
#*# y_count = 4
|
||||
#*# mesh_y_pps = 2
|
||||
#*# min_y = 40.0
|
||||
#*# x_count = 4
|
||||
#*# max_y = 199.99
|
||||
#*# mesh_x_pps = 2
|
||||
#*# max_x = 199.99
|
||||
BIN
assets/blog/rara-elegoo-printer-notes/mainboard_connectors.png
Normal file
BIN
assets/blog/rara-elegoo-printer-notes/mainboard_connectors.png
Normal file
Binary file not shown.
|
After 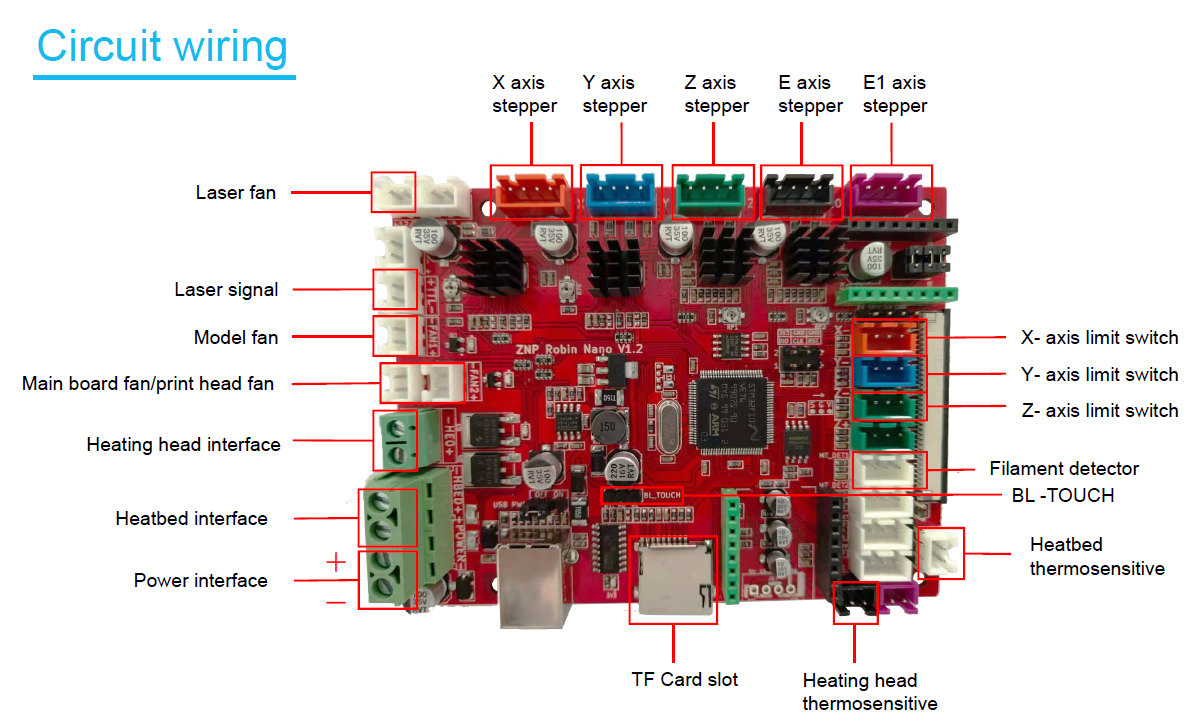
(image error) Size: 546 KiB |
BIN
assets/blog/rara-elegoo-printer-notes/micro_pinout.png
Normal file
BIN
assets/blog/rara-elegoo-printer-notes/micro_pinout.png
Normal file
Binary file not shown.
|
After 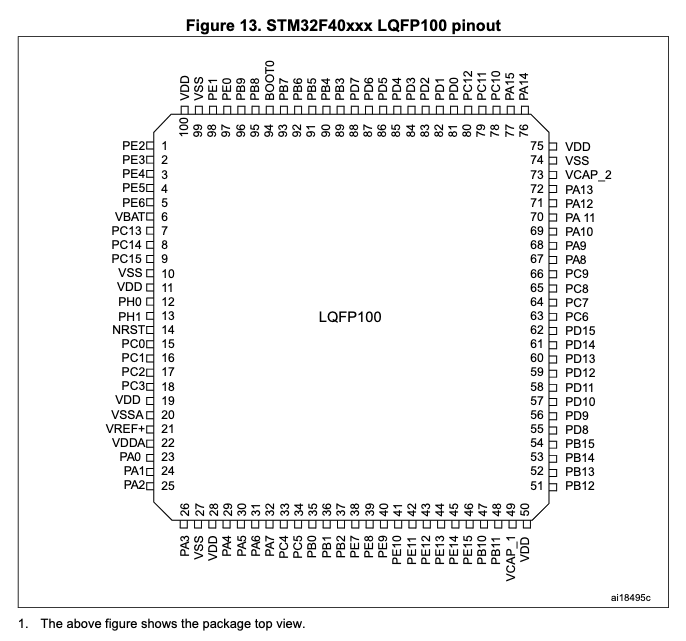
(image error) Size: 81 KiB |
BIN
assets/blog/rara-elegoo-printer-notes/pcb.png
Normal file
BIN
assets/blog/rara-elegoo-printer-notes/pcb.png
Normal file
Binary file not shown.
|
After 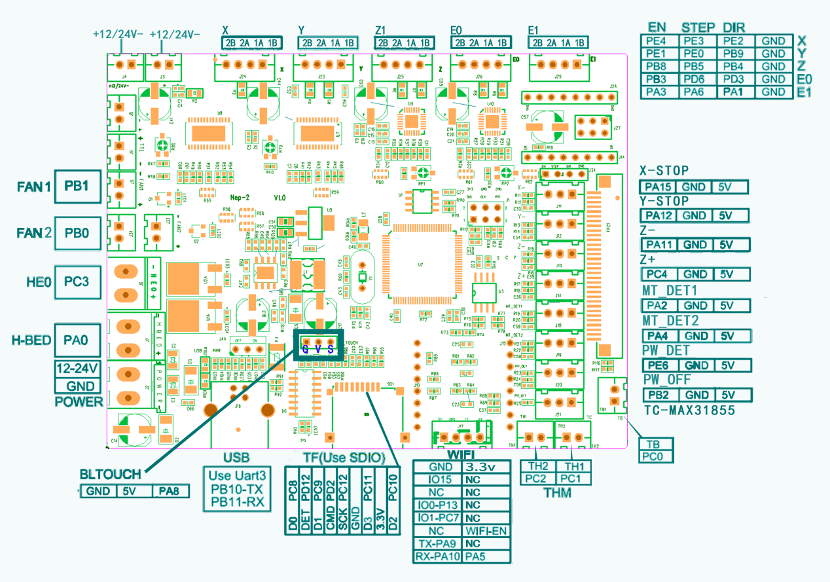
(image error) Size: 332 KiB |
BIN
assets/blog/rara-elegoo-printer-notes/thumbnail.jpg
Normal file
BIN
assets/blog/rara-elegoo-printer-notes/thumbnail.jpg
Normal file
Binary file not shown.
|
After 
(image error) Size: 136 KiB |
95
badge.html
95
badge.html
@ -14,32 +14,53 @@ img:
|
||||
<style>
|
||||
|
||||
header {
|
||||
display: flex;
|
||||
height: 100vh;
|
||||
justify-content: unset;
|
||||
font-size: min(3vw, 3vh);
|
||||
}
|
||||
|
||||
.profile-pic-name {
|
||||
.pic-name-text {
|
||||
display: flex;
|
||||
flex-direction: column;
|
||||
justify-content: space-around;
|
||||
height: 60vh;
|
||||
padding: 1rem;
|
||||
}
|
||||
|
||||
.pic-name {
|
||||
display: flex;
|
||||
gap: 1em;
|
||||
margin-bottom: 1em;
|
||||
}
|
||||
|
||||
.card-container {
|
||||
height: 30vh;
|
||||
}
|
||||
|
||||
p {
|
||||
font-size: min(7vw, 3vh);
|
||||
font-size: 1rem;
|
||||
}
|
||||
|
||||
.pic {
|
||||
border-radius: 50%;
|
||||
padding: 5px;
|
||||
border: 1px solid var(--theme-text-color);
|
||||
transition: border-color var(--night-mode-fade-time) ease-in-out;
|
||||
width: 40vw;
|
||||
height: 40vw;
|
||||
}
|
||||
|
||||
img.qr {
|
||||
width: 50vw;
|
||||
height: 50vw;
|
||||
--dimension: calc(0.6 * min(50vw, 100vh));
|
||||
width: var(--dimension);
|
||||
height: var(--dimension);
|
||||
z-index: 1;
|
||||
}
|
||||
|
||||
.avatar {
|
||||
width: 40vw;
|
||||
height: 40vw;
|
||||
}
|
||||
|
||||
header h1 {
|
||||
font-size: 15vw;
|
||||
margin-left: 5vw;
|
||||
font-size: 3rem;
|
||||
margin:0;
|
||||
}
|
||||
|
||||
.professional-links {
|
||||
@ -55,25 +76,19 @@ header h1 {
|
||||
}
|
||||
|
||||
.card {
|
||||
background: var(--theme-bg-color);
|
||||
padding: 20px;
|
||||
position: relative;
|
||||
display: flex;
|
||||
display: inline-flex;
|
||||
place-content: center;
|
||||
place-items: center;
|
||||
overflow: hidden;
|
||||
border-radius: 25px;
|
||||
|
||||
position: absolute;
|
||||
top: 100%;
|
||||
left: 50%;
|
||||
transform: translate(-50%, calc(-100% - 50px));
|
||||
}
|
||||
|
||||
.card::before {
|
||||
content: '';
|
||||
position: absolute;
|
||||
width: 100px;
|
||||
width: 30%;
|
||||
background: var(--theme-highlight-color);
|
||||
height: 150%;
|
||||
animation: rotBGimg 7s linear infinite;
|
||||
@ -98,16 +113,48 @@ header h1 {
|
||||
inset: 10px;
|
||||
border-radius: 15px;
|
||||
}
|
||||
|
||||
#mastospan {
|
||||
text-wrap: nowrap;
|
||||
}
|
||||
|
||||
svg#svg1826 {
|
||||
display: inline;
|
||||
}
|
||||
|
||||
@media (orientation: landscape) {
|
||||
header {
|
||||
flex-direction: row;
|
||||
}
|
||||
.card-container {
|
||||
width: 50vw;
|
||||
}
|
||||
|
||||
.pic-name-text {
|
||||
width: 50vw;
|
||||
height: 100vh;
|
||||
}
|
||||
|
||||
.pic-name {
|
||||
align-items: center;
|
||||
}
|
||||
.pic {
|
||||
--dimension: calc(0.6 * min(50vw, 100vh));
|
||||
width: var(--dimension);
|
||||
height: var(--dimension);
|
||||
}
|
||||
}
|
||||
|
||||
|
||||
</style>
|
||||
</head>
|
||||
<body class = "">
|
||||
<header class="h-card">
|
||||
<div class="profile-pic-name">
|
||||
<div class="pic-name-text">
|
||||
<div class="pic-name">
|
||||
<img
|
||||
src="/assets/images/avatar.jpeg"
|
||||
class="u-photo avatar"
|
||||
class="u-photo pic"
|
||||
alt="A picture of me."
|
||||
height="175"
|
||||
width="175"
|
||||
@ -128,14 +175,15 @@ header h1 {
|
||||
>@TomHodson {% include icons/github.svg %}</a
|
||||
>
|
||||
<a href="https://tech.lgbt/@Tomhodson" rel="me" class="u-url"
|
||||
>tech.lgbt/@Tomhodson {% include icons/mastodon.svg %}</a
|
||||
><span id="mastospan">tech.lgbt/@Tomhodson</span> {% include icons/mastodon.svg %}</a
|
||||
>
|
||||
</p>
|
||||
</div>
|
||||
</div>
|
||||
|
||||
<div class="card-container">
|
||||
<a href = "/">
|
||||
<div class = "card">
|
||||
|
||||
<img
|
||||
src="/assets/badge/qr.svg"
|
||||
class="qr invertable"
|
||||
@ -145,6 +193,7 @@ header h1 {
|
||||
/>
|
||||
</div>
|
||||
</a>
|
||||
</div>
|
||||
|
||||
|
||||
<div class="user-toggle">
|
||||
|
||||
@ -20,6 +20,7 @@ layout: none
|
||||
|
||||
{% for post in site.posts limit:20 %}
|
||||
{% if post.draft == false or jekyll.environment == "development" %}
|
||||
{% unless post.exclude_from_rss %}
|
||||
{
|
||||
"id": "{{ post.url | prepend: site.baseurl | prepend: site.url }}",
|
||||
"url": "{{ post.url | prepend: site.baseurl | prepend: site.url }}",
|
||||
@ -30,6 +31,7 @@ layout: none
|
||||
"date_published": "{{ post.date | date_to_rfc822 }}",
|
||||
"date_modified": "{{ post.last_modified_at | date_to_rfc822 }}"
|
||||
}{% unless forloop.last %},{% endunless %}
|
||||
{% endunless %}
|
||||
{% endif %}
|
||||
{% endfor %}
|
||||
]
|
||||
|
||||
10
feed.xml
10
feed.xml
@ -16,9 +16,10 @@ layout: none
|
||||
<atom:link href="{{ site.url }}/{{ page.path }}" rel="self" type="application/rss+xml" />
|
||||
<lastBuildDate>{{ site.time | date_to_rfc822 }}</lastBuildDate>
|
||||
<language>en-gb</language>
|
||||
{% assign feed_items = site.feed.post_limit | default: 10 %}
|
||||
{% for post in site.posts limit:feed_items %}
|
||||
{% assign feed_items = site.feed.post_limit | default: 10 %}
|
||||
{% for post in site.posts limit:feed_items %}
|
||||
{% if post.draft == false or jekyll.environment == "development" %}
|
||||
{% unless post.exclude_from_rss %}
|
||||
<item>
|
||||
<title>{{ post.title | xml_escape }}</title>
|
||||
<dc:creator>Tom Hodson</dc:creator>
|
||||
@ -37,11 +38,12 @@ layout: none
|
||||
<pubDate>{{ post.date | date_to_rfc822 }}</pubDate>
|
||||
<link>{{ site.url }}{{ post.url }}</link>
|
||||
<guid isPermaLink="true">{{ site.url }}{{ post.url }}</guid>
|
||||
<!-- {% if post.social_image %}
|
||||
<!-- {% if post.social_image %}
|
||||
<media:thumbnail width="250" height="250" url="{{ site.url }}{{ post.social_image }}"/>
|
||||
{% endif %} -->
|
||||
</item>
|
||||
{% endunless %}
|
||||
{% endif %}
|
||||
{% endfor %}
|
||||
{% endfor %}
|
||||
</channel>
|
||||
</rss>
|
||||
Loading…
x
Reference in New Issue
Block a user